
整车控制器软件开发-整车性能开发
随着汽车产品越来越电子化,人们越来越接受各种先进的安全系统和先进的驾驶辅助系统。 盲点检测、自动紧急制动等原本价格不菲的功能成本下降,迅速获得市场青睐。 据富士奇美拉研究所(Fuji Chimera Research Institute)预测数据显示,全球汽车ECU市场正以约6.0%的年复合增长率增长,2027年市场规模将达到980亿美元以上。
1.汽车ECU软件
汽车ECU(Electronic Control Unit)又称“驾驶大脑”。 其功能可以简单描述为“采集传感器信号,与其他控制器保持通信,控制相应的执行器”(如图1所示)。 硬件的复杂组合。 其硬件范围包括发动机控制器、电机控制器和整车控制器。
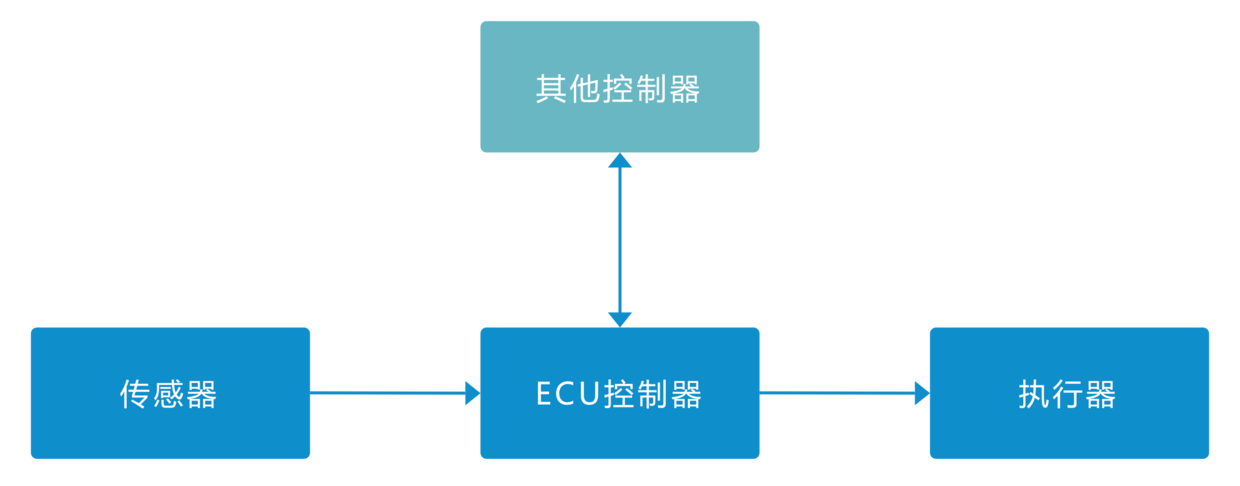
▲图1 汽车电控系统
从软件角度看,汽车ECU软件可分为应用层软件(Application Software,ASW)、底层软件(Basic Software,BSW)和引导加载程序(Bootloader)三部分。
1、应用层软件
应用层软件通常由一定数量的“模块”或“单元”组成,可以称为“软件组件”(Software Component整车控制器软件开发,SWC)。 软件组件既是应用层软件的核心,又是底层软件的载体。 将几个软件组件组合在一起,发挥各自的功能,就可以构成一个比较完整的应用层软件。 软件组件通过端口进行交互,每个软件组件包含若干封装控制算法的Runnable Entity,可由运行时环境事件(Runtime Environment Event,RTE Event)触发,通过复杂的控制逻辑算法实现车辆在不同驾驶条件下的精准控制和应用场景。
2.底层软件
底层软件在全球公认的AUTOSAR(AUTomotive Open System ARchitecture)下抽象分为三个层次,即Service Layer、ECU Abstraction Layer、Micro Controller Abstraction Layer(微控制器抽象层)。 从功能上看:
服务层:诊断、内存管理、操作系统、通信、ECU管理;
ECU抽象层:ECU板上外部设备的驱动,内部设备与外部设备的接口(I/O);
微控制器抽象层:MCU(Microcontroller Unit,MCU)内部外设的驱动,使用MCU内存映射的外部设备的驱动。
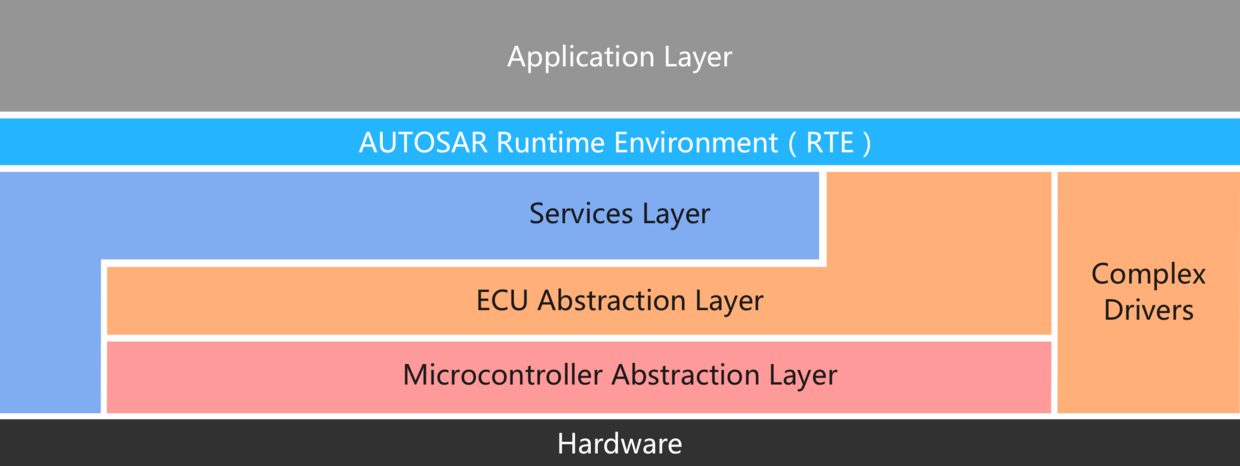
▲图2 AUTOSAR架构下三者的关系
3.引导程序
Bootloader,即引导加载程序,是系统在上电或复位后运行的第一个程序代码。 它的主要作用是将系统的软硬件环境调整到合适的状态,为应用程序的最终调用和进入软件做准备。 准备。 具体来说,Bootloader是底层硬件与上层应用软件之间的中间接口。 在汽车ECU中,bootloader是一个独立的程序,上电即开始执行。 它将通过诊断通信链路将应用软件下载到ECU。 下载功能对于在开发、生产和服务期间重新编程 ECU 至关重要。
2.具体理解
汽车想要具备自适应巡航能力,需要应用层软件ASW和底层软件BSW相互配合。 ASW通过实际车速信息来控制油门和刹车,BSW的职责是读取和处理速度传感器的数值。 为了更直观的理解ASW和BSW,以下图为例:
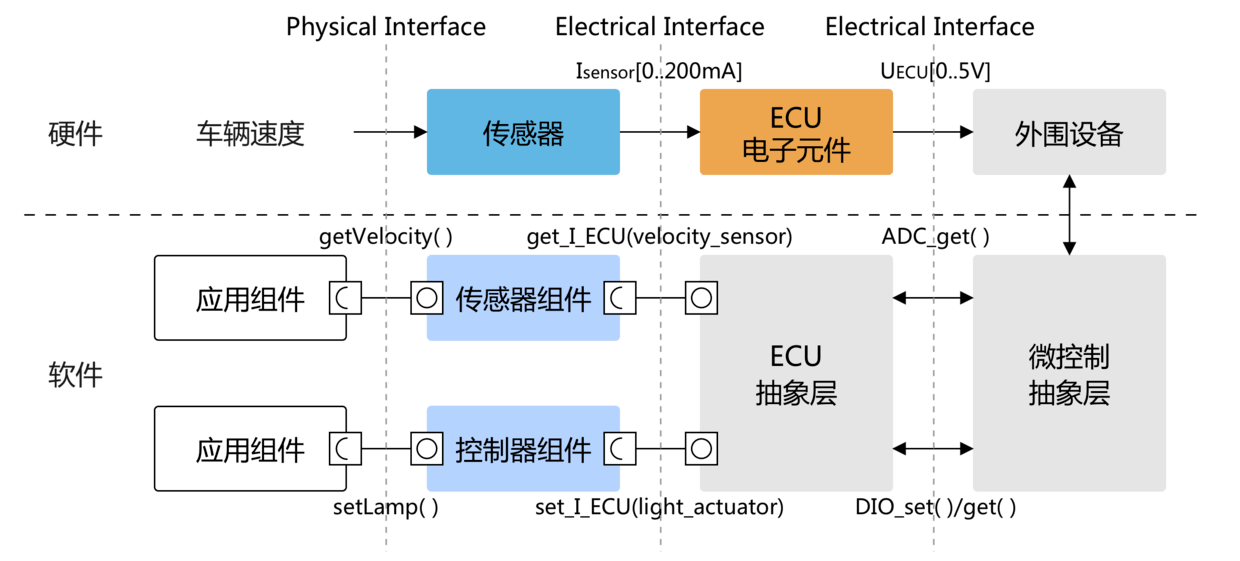
▲图3 ECU硬件与软件之间的信号传输
在:
1、速度传感器输出的是模拟电流信号,小车速度的物理值与电流值存在映射关系。
2、ECU电子元器件会对车速传感器的输出值进行处理并传送给MCU,MCU需要将其转换成数字信号进行计算处理,即Analog-to-Digital Converter(ADC) . 该过程需要配置模数转换的相关参数。
一般来说,BSW需要配置相应传感器的采集模块,接收各种传感器信号,并转换成相应的物理值传输给ASW:
ASW专注于实现车辆特定功能和性能的控制算法,根据实时车速等信号实现自适应巡航控制逻辑和算法。
BSW通过配置与硬件或基本功能相关的参数,与ECU硬件建立联系,对各种传感器信号进行采集、处理和传输。
三、相关思考
ASW与BSW的合作,使汽车电子技术成为汽车各项功能扩展和性能提升的重要技术支撑。 在汽车新能源化和智能化浪潮中整车控制器软件开发,亚太地区汽车产量持续增长,高端化发展趋势明显。 已成为全球最大的汽车ECU市场,未来5年需求增速将明显高于全球平均水平。 ,市场份额将继续增加。 相应地,与汽车电子技术相关的功能需求也将不断增加,控制软件也将变得越来越复杂。
然而,在市场体量和需求不断攀升的背景下,汽车ECU软件开发工具国产化进程不容乐观。 国内厂商在很大程度上仍然依赖Mathworks、NI、西门子等软件。 为防止国外软件断供,自主开发刻不容缓。 解决“卡脖子”问题,迫切需要更换国产开发工具,实现ECU应用软件开发工具链的自主可控。
帝杰软件完全自主研发的建模仿真和代码生成软件ModelCoder,使工程师能够应用基于模型的设计来设计应用层软件,从而为ASW和BSW打下坚实的基础,解决应用层软件问题。 算法复杂度呈指数级增长带来的困难,可以提高软件的复用性,提高软件开发质量和效率,降低开发风险和成本。
ModelCoder可以通过精准的控制算法或策略解决车辆的实际行驶工况和应用场景:
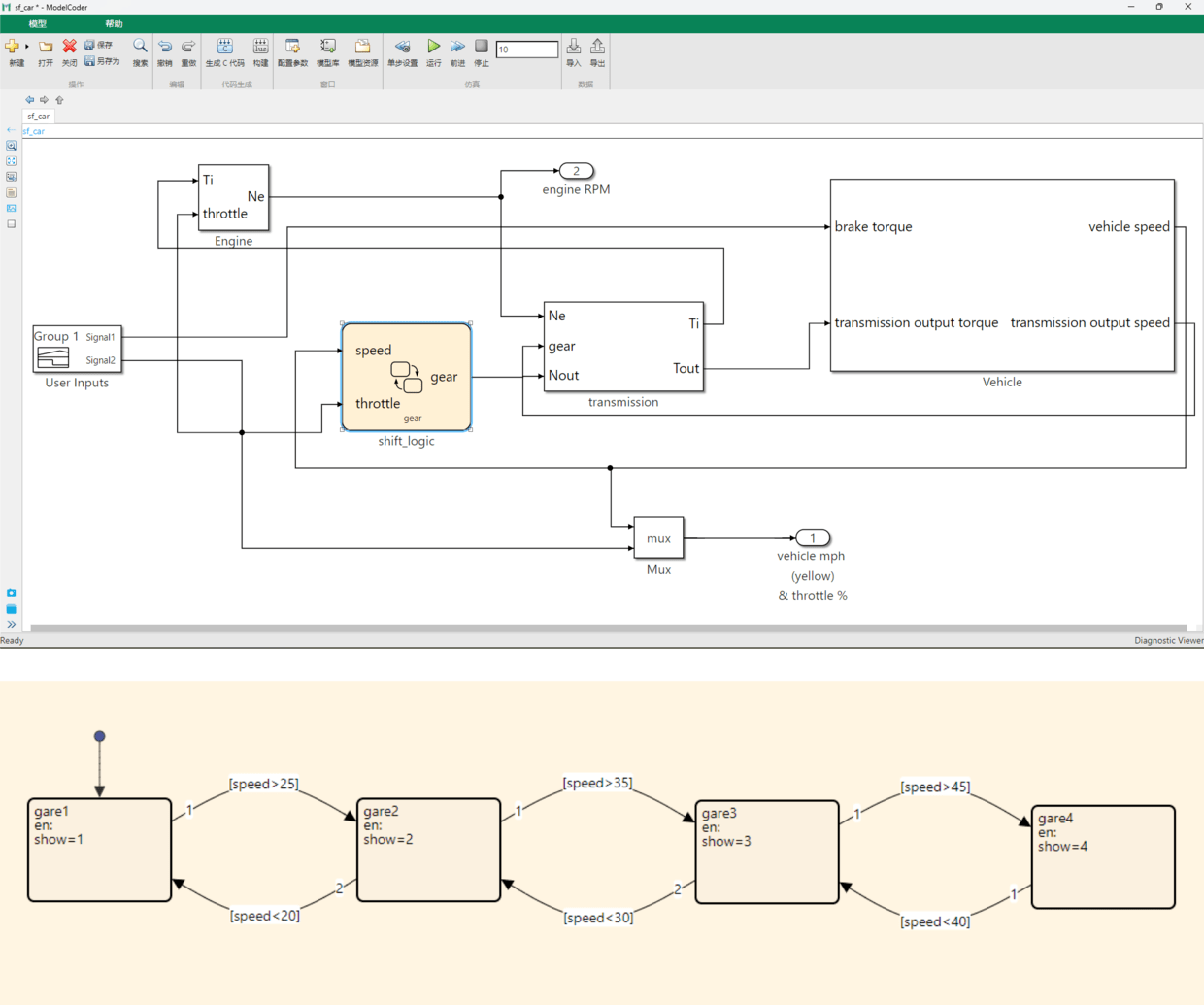
图4 ModelCoder 基于模型的应用软件开发
 上一篇
上一篇 








